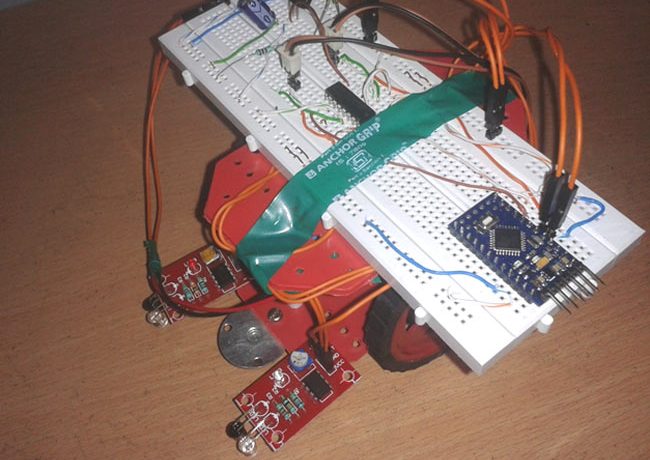
/*—— Program for Line Follower Robot using Arduino—– */
/*——-definning Inputs——*/
#define LS 2 // left sensor
#define RS 3 // right sensor
/*——-definning Outputs——*/
#define LM1 4 // left motor
#define LM2 5 // left motor
#define RM1 6 // right motor
#define RM2 7 // right motor
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
}
void loop()
{
if(digitalRead(LS) && digitalRead(RS)) // Move Forward
{
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if(!(digitalRead(LS)) && digitalRead(RS)) // Turn right
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if(digitalRead(LS) && !(digitalRead(RS))) // turn left
{
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
if(!(digitalRead(LS)) && !(digitalRead(RS))) // stop
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
}











 Prototyping Kit
1 × 7,500 د.ع
Prototyping Kit
1 × 7,500 د.ع  Breadboard Power Module MB102
1 ×
Breadboard Power Module MB102
1 ×  Prototype Breadboard
1 ×
Prototype Breadboard
1 ×  65 Flexible Wire Jumpers
1 ×
65 Flexible Wire Jumpers
1 ×