-
×
 Soldering Kit
1 × 14,000 د.ع
Soldering Kit
1 × 14,000 د.ع -
 40 Watt Soldering Iron
1 ×
40 Watt Soldering Iron
1 × -
 Solder Wire 50g 0.8mm
1 ×
Solder Wire 50g 0.8mm
1 × -
 Desoldering Pump Sucker (Solder Remover Tool)
1 ×
Desoldering Pump Sucker (Solder Remover Tool)
1 × -
×
 Standard DC Motor (R130)
1 × 750 د.ع
Standard DC Motor (R130)
1 × 750 د.ع -
×
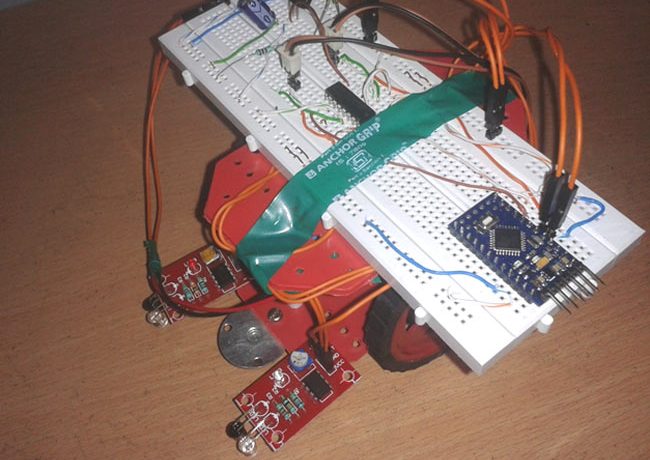
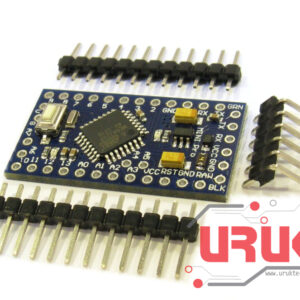 Arduino Pro Mini 5V/16MHz
1 × 9,000 د.ع
Arduino Pro Mini 5V/16MHz
1 × 9,000 د.ع -
×
 9V to Barrel Jack Adapter
1 × 1,000 د.ع
9V to Barrel Jack Adapter
1 × 1,000 د.ع
Subtotal: 24,750 د.ع